挖掘機械 excavator
 挖機人
2009-06-09
挖機人
2009-06-09
2362
2
wajue jixie
挖掘機械(卷名:機械工程)
excavator
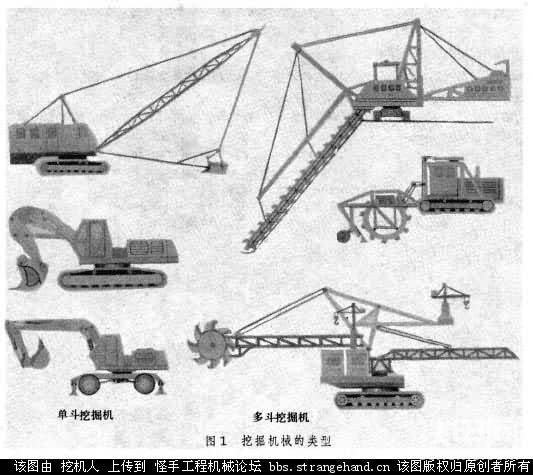
用鏟斗挖掘高于或低于承機面的物料并裝入運輸車輛或卸至堆料場的土方機械。挖掘的物料主要是土壤、煤、泥沙及經過預松后的巖石和礦石。一般工程中約60%的土方量、露天礦山80%的剝離量和采掘量是用挖掘機械完成的。挖掘機械分為單斗挖掘機和多斗挖掘機兩類(圖1)。單斗挖掘機的作業是周期性的,多斗挖掘機的作業是連續性的。
簡史 單斗挖掘機的發展大致可分為 4個階段。①16~18世紀的雛形階段。最早的挖掘機是以人力或畜力為動力用于挖深河底的浚泥船,鏟斗容量一般不超過0.2~0.3米3。②1833~1910年的蒸汽鏟階段。1833~1836年,美國人W.S.奧蒂斯設計和制造了第一臺蒸汽機驅動、鐵木混合結構、半回轉、軌行式的單斗挖掘機,生產率為35米3/時,但由于經濟性差沒有應用。70年代經過改進的蒸汽鏟正式生產并應用于露天礦剝離。1880年生現了第一批以拖拉機為底盤的半回轉式蒸汽鏟。③20世紀初至40年代末的動力和行走裝置多樣化階段。1910年出現了第一臺電機驅動的單斗挖掘機;1912年出現了汽油機和煤油機驅動的全回轉式單斗挖掘機;1916年出產了柴油發電機驅動的單斗挖掘機;1924年柴油機直接驅動開始用于單斗挖掘機上。履帶式行走裝置于1910年開始采用。輪胎式行走裝置隨著汽車工業的發展,廣泛用于小型挖掘機。30年代,出現了步行式行走裝置。④50年代以后的液壓化和大型化階段。50年代中期,聯邦德國和法國相繼研制出全回轉式液壓挖掘機,從此單斗挖掘機的發展進入一個新階段。
多斗挖掘機也有 100多年的歷史。法國于1860年生產了世界上最早的結構比較成熟的多斗挖掘機,用于蘇伊士運河開挖工程。1889年,美國生產的多斗挖溝機可挖寬0.29米、深1.4米的溝渠。19世紀末,斗輪挖掘機在德國褐煤采掘中得到廣泛應用,至1958年每個鏟斗容量已達3600升。蘇聯于1973年研制出生產率為5000米3/時的斗輪挖掘機。1977年,聯邦德國制造了世界上最大的斗輪挖掘機,其生產率為24萬米3/日。
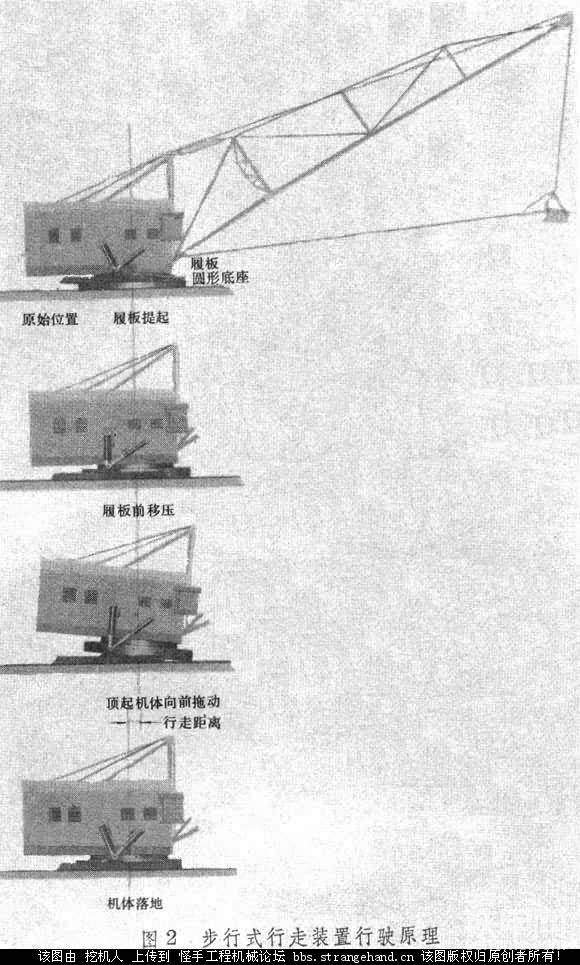
結構 挖掘機械由動力裝置、傳動裝置、行走裝置和工作裝置等組成。單斗挖掘機和斗輪挖掘機還有轉臺,多斗挖掘機還有物料輸送裝置。動力裝置有柴油機、電動機、柴油發電機組或外電源變流機組。柴油機和電動機大多用于中、小型挖掘機械,用一臺原動機集中驅動,兩者可互換。柴油發電機組和外電源變流機組用于大、中型挖掘機械,用多臺電機分散驅動。傳動裝置分機械式和液壓式兩種(見機械傳動、液壓傳動)。行走裝置用來支承機器、使機器變換工作位置和轉移作業場地。多斗挖掘機中的鏈斗式挖掘機和環輪式挖掘機的鏟斗隨著行走裝置的連續行走而切削土壤。行走裝置有履帶式、輪胎式、步行式、軌行式、浮游式和拖掛式等幾種。作業場地固定、 要求接地比壓較低(一般在0.1兆帕左右)時用履帶式;作業場地多變時用輪胎式;因施工條件特殊而必須架設專用軌道時,用軌行式;挖掘水下泥土用浮游式;小型單斗挖掘機的行走裝置無動力源時,用拖掛式。作業場地固定、機器重量大又要求接地比壓在0.07兆帕以下時,用步行式。步行式行走裝置大多用于單斗挖掘機中的大、中型拉鏟挖掘機和斗輪挖掘機。這種裝置由圓形底座和兩條對稱安裝在兩側的長方形履板組成。機器作業時,圓形底座壓在地面上支承機器,兩條履板離開地面,隨轉臺一起轉動。機器行走時,兩條履板向前移動一段距離后下降與地面接觸(圖2a、b), 驅動機構將圓形底座連同固定在其上的機體沿履板作縱向傾斜,使一端接地后沿地面向前拖動(圖2c)。當機器重心越過兩履板中點連線以后,圓形底座平落在地面上(圖2d),然后升起雙履板,開始下一個循環。這樣周而復始地使機器不斷前進。工作裝置包括鏟斗和支承鏟斗的構件,用于挖掘物料并運離作業面。
參考書目
天津工程機械研究所編:《單斗液壓挖掘機》,中國建筑工業出版社,北京,1977。
Н.Τ.Домбровсκий,С.α.Панκратов,Землеройные машины,Γостройиздат,Μосκва,1961.
楊紅旗
-
 老于
2010-02-28
老于
2010-02-28
-
 劉星
2009-07-22
劉星
2009-07-22
:funk
已展示全部評論